Instance Segmentation
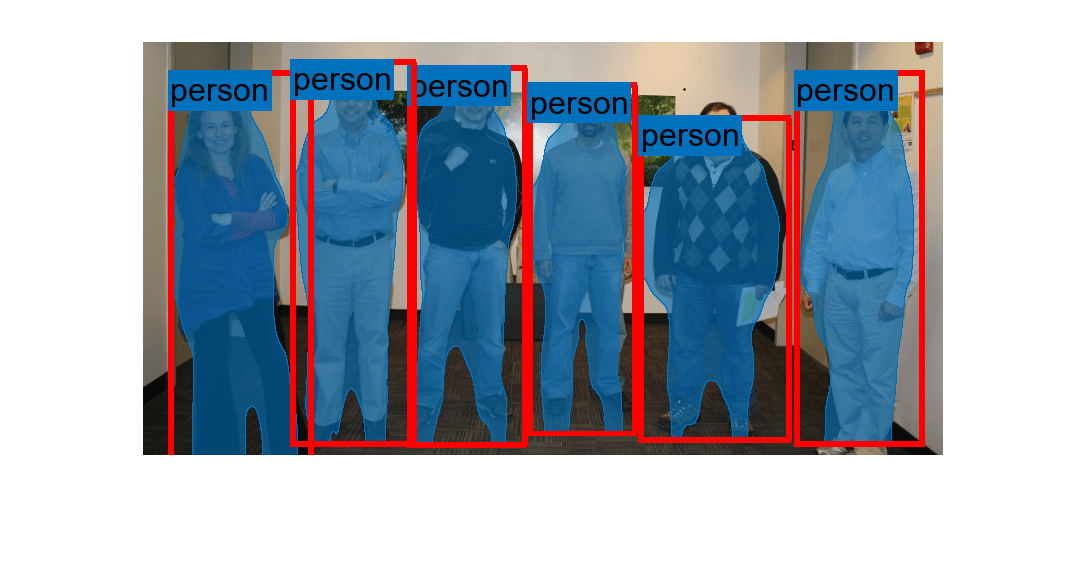
Instance segmentation is a computer vision technique that plays a crucial role in tasks requiring precise object localization and the identification of individual object instances, such as in medical imaging and autonomous driving. By combining the principles of object detection and semantic segmentation, instance segmentation provides a more refined understanding of visual data by identifying individual object instances and delineating their boundaries pixel-by-pixel. Use instance segmentation to precisely identify, classify, and separate individual objects within an image.
You can run inference on an image using a pretrained deep learning network, or perform transfer learning, an approach that enables you to start with a pretrained network and then train it on custom data set for your application. To generate ground truth data for training, you can use the Image Labeler, Video Labeler, or Ground Truth Labeler (Automated Driving Toolbox) app to interactively label pixels and export label data. Instance segmentation requires Deep Learning Toolbox™. Training and inference support CUDA®-enabled GPU. Use of a GPU is recommended, and requires Parallel Computing Toolbox™. For more information, see Parallel Computing Support in MathWorks Products (Parallel Computing Toolbox).

Funzioni
Argomenti
Get Started
- Get Started with Instance Segmentation Using Deep Learning
Segment objects using an instance segmentation model such as SOLOv2 or Mask R-CNN. - Get Started with SOLOv2 for Instance Segmentation
Perform multiclass instance segmentation using SOLOv2 and deep learning. - Getting Started with Mask R-CNN for Instance Segmentation
Perform multiclass instance segmentation using Mask R-CNN and deep learning.
Train Data for Instance Segmentation
- Get Started with Image Preprocessing and Augmentation for Deep Learning
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping. - Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications.
Esempi in primo piano

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)